pyrobots
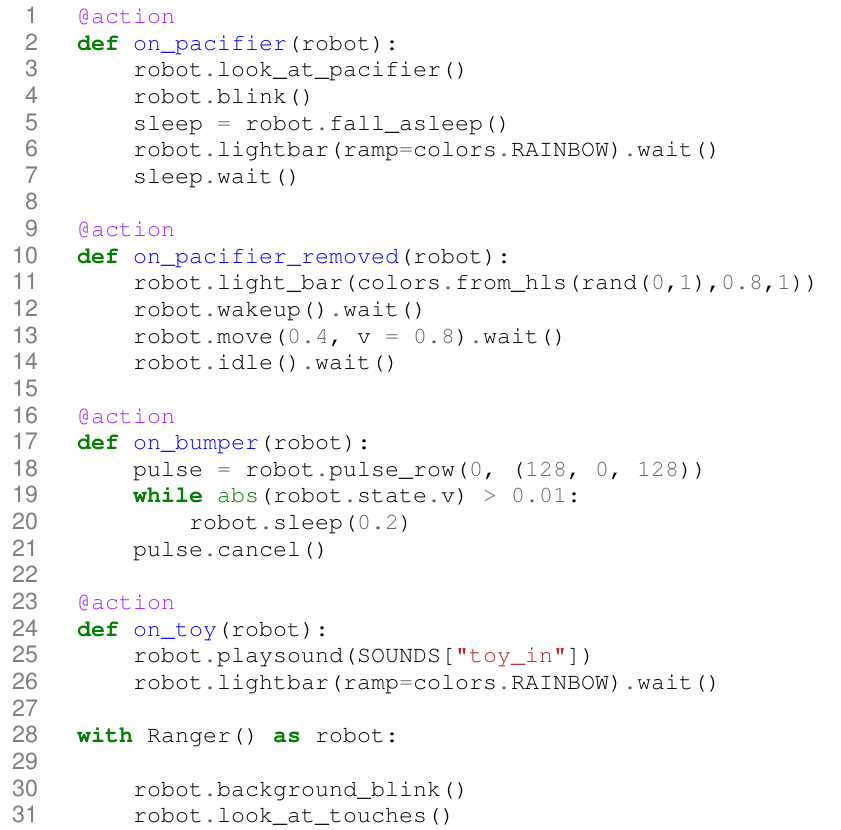
pyRobots is a toolkit for the high-level
programming of interactive robots in Python. It
provides a set of Python decorators to easily turn
standard functions into background tasks which can be
cancelled at anytime and to make your controller aware
of the hardware resource (for instance, to ensure two
tasks are not controlling the same motor at the same
time).
It also provides a event-based mechanism to monitor
specific conditions and asynchronously trigger actions.
It finally provides a library of convenient tools to
manage poses in a uniform way (quaternions, Euler
angles and 4D matrices, I look at you) and to interface
with existing middlewares (ROS, naoqi, aseba...).
Related publication: